舵機
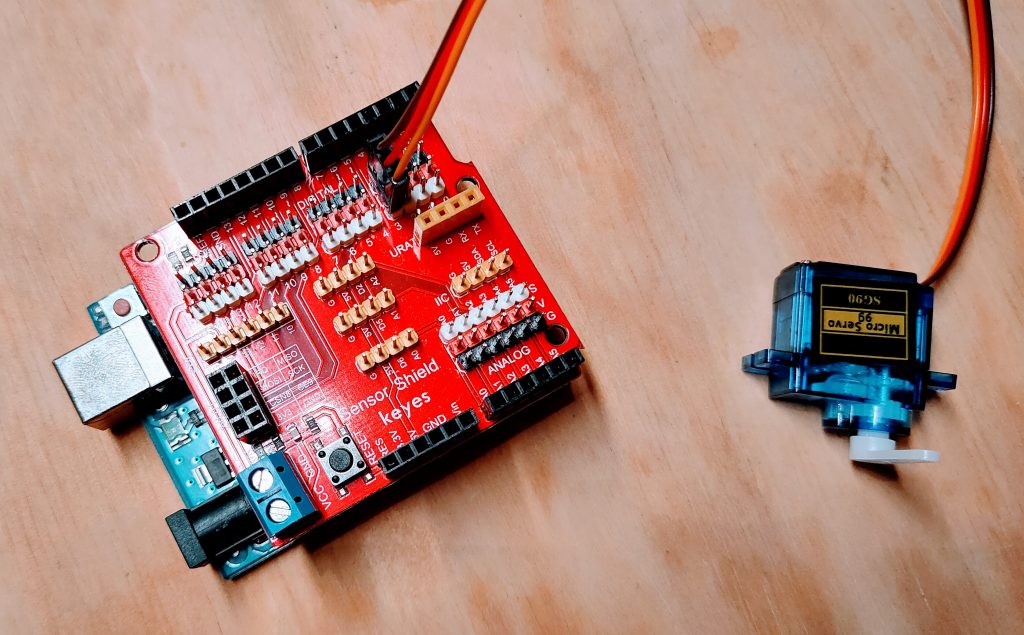
定位到90度
#include <Servo.h>
Servo myservo3;
void setup() {
myservo3.attach(3);
}
void loop() {
myservo3.write(90);
}0到180度反覆轉動
#include <Servo.h>
Servo myservo3;
int i;
void setup() {
myservo3.attach(3);
}
void loop() {
for (i=0;i<180;i++){
myservo3.write(i);
delay(20);
}
for (i=180;i>0;i--){
myservo3.write(i);
delay(20);
}
}

下面是上課解答,先自己試試看,不要急著看答案
123木頭人解答
#include <Servo.h>
Servo myservo5; // 頭裝pin5
Servo myservo9; // 兩隻手裝pin9,10
Servo myservo10;
int i;
void setup() {
myservo5.attach(5);
myservo9.attach(9);
myservo10.attach(10);
}
void loop() {
myservo5.write(180);
delay(1500);
for (i=180;i>0;i--){
myservo5.write(i);
delay(15);
}
for (i=0;i<180;i++){
myservo9.write(i);
myservo10.write(i);
delay(10);
}
for (i=180;i>0;i--){
myservo9.write(i);
myservo10.write(i);
delay(10);
}
}雙臂同步答案
#include <Servo.h>
Servo myservo3;
Servo myservo5;
void setup() {
myservo3.attach(3);
myservo5.attach(5);
}
void loop() {
int i;
for (i=0;i<180;i++){
myservo3.write(i);
myservo5.write(180-i);
delay(10);
}
for (i=180;i>0;i--){
myservo3.write(i);
myservo5.write(180-i);
delay(10);
}
}

