第6堂 PID演算法
硬體組裝
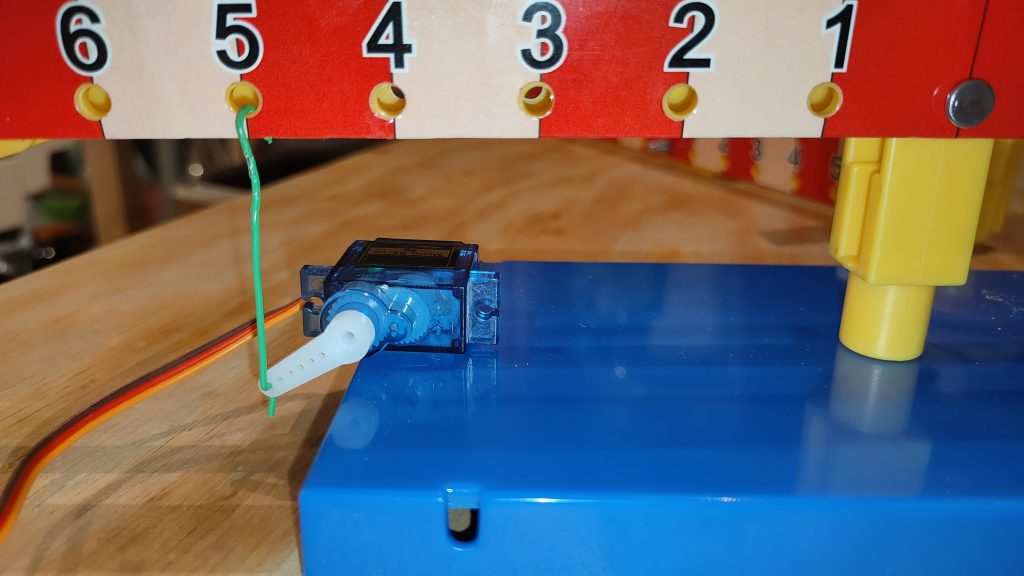
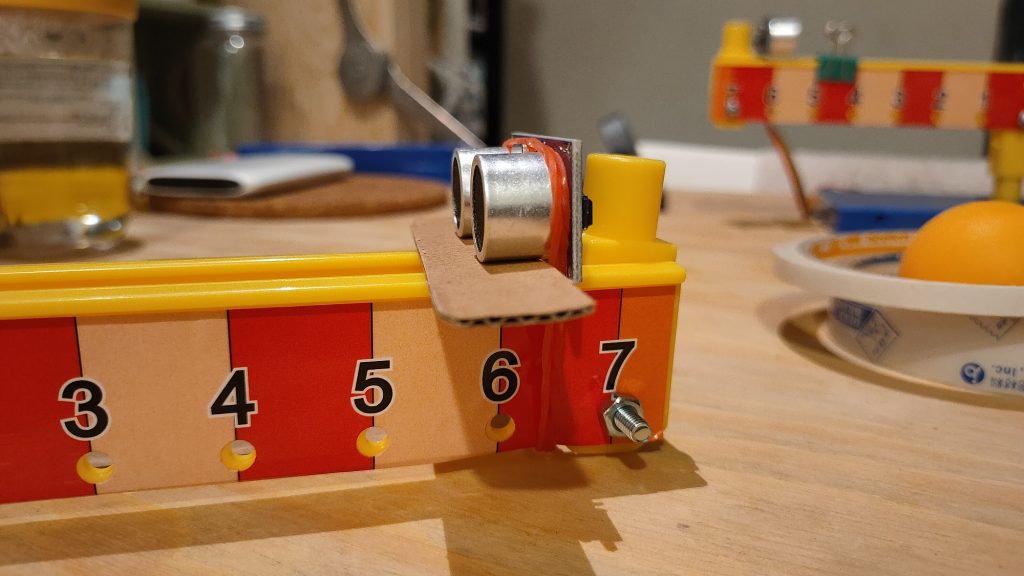

接線
舵機pin8
超音波trig 3, echo 4
PID參考程式
#include <Servo.h>
Servo servo8;
#include <HCSR04.h>
HCSR04 hc(3,4);
int angle;
float time, distance;
float setPoint=11; //中心距離
float error, previous_error;
float kp=10; //10
float ki=0.05; //0.05
float kd=200; //200
int dt=50;
float P,I,D,PID;
void setup() {
Serial.begin(9600);
servo8.attach(8);
time = millis();
}
void loop() {
if (millis() > time + dt){
time = millis();
distance = hc.dist();
error = distance-setPoint;
P = kp*error; //**********************************P
if(-4 < error && error < 4){
I=I+ki*error; //********************************I
}else{
I = 0;
}
D = kd*((error - previous_error)/dt); //***********D
PID=P + I + D ; //*********************************PID
if (PID>200){
PID=200;
}
if (PID<-200){
PID=-200;
}
previous_error=error; //下一個迴圈用,一定要寫在下面這邊
Serial.print("Distance: "); Serial.print(distance);
Serial.print("Error: "); Serial.print(error);
Serial.print(" P: "); Serial.print(P);
Serial.print(" D: "); Serial.print(D);
Serial.print(" I: "); Serial.print(I);
Serial.print(" PID: "); Serial.println(PID);
angle = map(PID, -200,200,120,90);
servo8.write(angle);
}
}舵機固定在90度代碼
#include <Servo.h>
Servo myservo8;
void setup() {
myservo8.attach(8);
}
void loop() {
myservo8.write(90);
}

